2025-07-02 J&WがASRock IndustrialのiEP-5000GとUniversalAutomation.org(UAO)ランタイムを活用し、スマート物流センターを向上
倉庫運営の近代化を目指して、J&WはASRock Industrialと提携し、人間とコボット(協働ロボット)を統合したハイブリッド型自動化システムを導入しました。このシステムには、モジュラー型コンベアループ、画像認識ベースの制御ゲート、自律型移動ロボット(AMR)が含まれています。ASRock IndustrialのiEP-5000G産業用エッジコントローラー(IEC 61499準拠)によって駆動されるこのシステムは、制御システム、ロボット、ITプラットフォーム間のシームレスな連携を実現し、eコマース物流センターのワークフローにリアルタイムの対応力、効率性、スケーラビリティをもたらします。

 課題
課題
あるeコマース物流センターでは、手作業による仕分けとピッキング工程が原因となり運用上のボトルネックが発生しました。このため、人手に依存することでエラー率が上昇し、処理能力が制限され、注文の履行が遅延しました。既存のインフラストラクチャには、進化する生産需要に対応する柔軟性が欠けており、プロセスの調整には時間のかかる再プログラミングが必要で、システムのダウンタイムを引き起こしていました。さらに、制御システム、ロボット部品、および企業ITプラットフォーム間のシームレスな統合が欠如していたため、データ環境が断片化し、リアルタイムの意思決定やシステム全体の同期が妨げられていました。これらの制約は、倉庫業務全体で適応型の自動化、一貫した正確性、そしてスケーラブルなパフォーマンスを提供できる統合されたインテリジェントなソリューションの必要性を浮き彫りにしました。

解決策
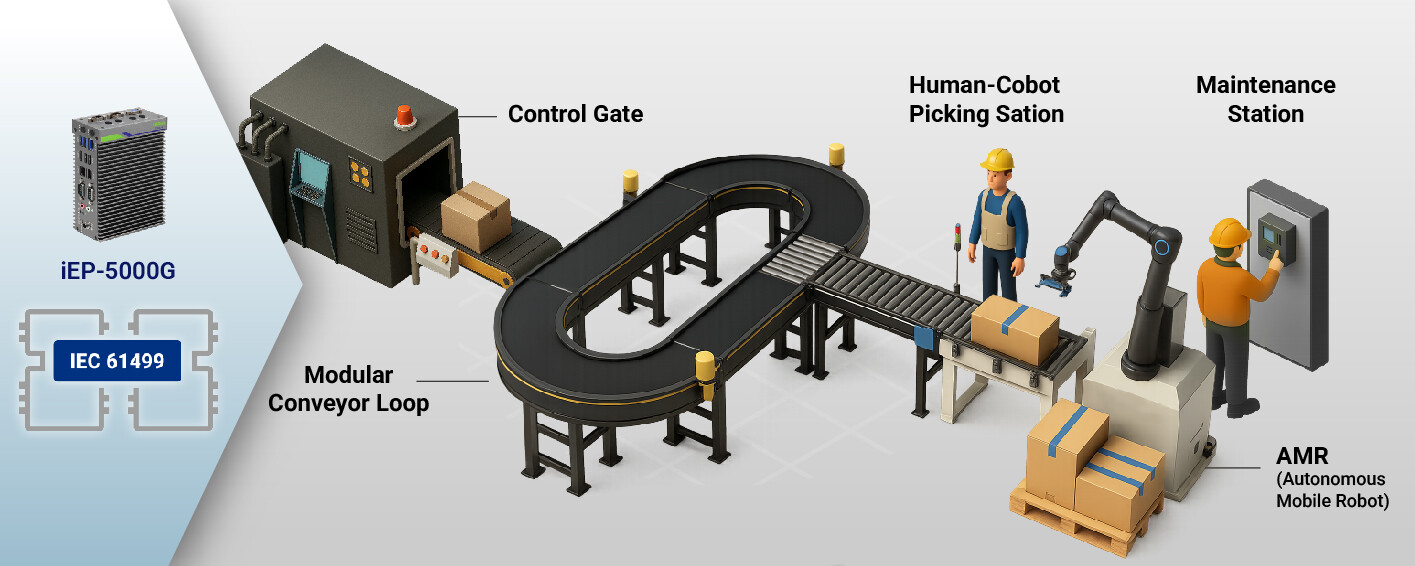
これらの課題を克服するために、J&Wは次世代の自動化アーキテクチャを導入しました。このアーキテクチャは、人間とコボット(協働ロボット)を組み合わせたハイブリッドシステムを基盤としており、ASRock IndustrialのiEP-5000G産業用IoTコントローラー(UAOのIEC 61499ランタイムで稼働)によって調整されています。このシステムは、モジュラー型のコンベアループとスマートセンサーやタグを埋め込んだステーションを統合しており、指定されたステーションへの動的なルーティングを可能にします。画像認識対応の制御ゲートにはRFID/NFCリーダーが搭載されており、IEC 61499ロジックを使用してリアルタイムでアイテムの認識とルートの調整を行います。
人間とコボットのピッキングステーションでは、コボットが人間の作業者をサポートし、WILLIEシステムによる最適化を通じて、人間と機械の相互作用を向上させながら正確なアイテムのピッキングを実現します。自律型移動ロボット(AMR)は、すべてのステーション間や梱包・出荷エリアへのビンの輸送を管理します。専用のメンテナンス・ステーションは、運営を妨げることなくシステムの調整やメンテナンスを可能にします。また、継続的なシステム監視により、最大限のエネルギー効率と稼働時間が確保されます。この統合されたエッジ駆動型インフラストラクチャは、制御システム、ロボット、ITプラットフォーム間のシームレスな連携を実現し、現代の物流センターのニーズに合わせた自動化された商品のピッキングおよび処理システムを可能にします。
メリット
• 大規模での運用効率
統合された自動化システムは、スループットを加速し、手作業を最小限に抑えることで、労働への依存を軽減しながら、連続した大量の運用を可能にします。
• 強化された精度と信頼性
画像認識によるピッキングと協働ロボットは、エラー率を大幅に削減し、ワークフロー全体で一貫した品質を維持します。
• 未来に対応する柔軟性
IEC 61499に対応したモジュラー制御ロジックにより、迅速な再構成とスムーズなスケーラビリティが可能となり、進化する運用ニーズやデジタル・トランスフォーメーションの目標と整合性を確保します。
関連製品